# 图像二值化
# 二值化(Thresholding)
二值化是将图像使用黑和白两种值表示的方法,就是将图像上的像素点的灰度值设置为0或255,也就是将整个图像呈现出明显的黑白效果的过程。 (其中0是黑,255是白)。
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <iostream>
int main(int argc, const char* argv[]){
cv::Mat img = cv::imread("imagepath", cv::IMREAD_COLOR);
int height = img.rows;
int width = img.cols;
int th = 128;//阈值,Threshold value
cv::Mat out = cv::Mat::zeros(height, width, CV_8UC1);
//灰度化
for (int j=0; j<height; j++){
for (int i=0; i<width; i++){
uchar val = (int)((float)img.at<cv::Vec3b>(j,i)[0] * 0.0722 + \
(float)img.at<cv::Vec3b>(j,i)[1] * 0.7152 + \
(float)img.at<cv::Vec3b>(j,i)[2] * 0.2126);
if (val < th)
{
val = 0;
}
else
{
val = 255;
}
out.at<uchar>(j,i) = val;//通过跟阈值比较进行二值化
}
}
//cv::imwrite("out.jpg", out);
cv::imshow("answer", out);
cv::waitKey(0);
cv::destroyAllWindows();
return 0;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
阈值
RGB三彩图需要先将图片灰度化,再对图像像素设置一个阈值进行二值化操作。
阈值,可以看作一个分界指,两边的像素(大于阈值或者小于阈值)赋值是0或者255.
但是图片二值化过程中人工确定阈值往往效果不好。于是有了otsu,大津法二值化提出。
# 大津二值化算法(Otsu's Method)
大津法(OTSU)是一种图像灰度自适应的阈值分割算法,是1979年由日本学者大津提出,并由他的名字命名的。大津法按照图像上灰度值的分布,将图像分成背景和前景两部分看待,前景就是我们要按照阈值分割出来的部分。背景和前景的分界值就是我们要求出的阈值。遍历不同的阈值,计算不同阈值下对应的背景和前景之间的类内方差,当类内方差取得极大值时,此时对应的阈值就是大津法(OTSU算法)所求的阈值。 来源
算法描述
对于图像I(x,y),前景(即目标,白色部分)和背景的分割阈值记作T,属于前景(大于阈值)的像素点数占整幅图像的比例记为ω0,其平均灰度μ0;
背景像素(小于阈值)点数占整幅图像的比例为ω1,其平均灰度为μ1。图像的总平均灰度记为μ1,类间方差记为g。
假设图像的背景较暗,并且图像的大小为M×N,图像中像素的灰度值大于阈值T的像素个数记作N0,像素灰度小于阈值T的像素个数记作N1,
则有:
ω0=N0/ M×N (1)
ω1=N1/ M×N (2)
N0+N1=M×N (3)
ω0+ω1=1 (4)
μ=ω0μ0+ω1μ1 (5)
g=ω0(μ0-μ)^2+ω1(μ1-μ)^2 (6)
将式(5)代入式(6),得到等价公式:
g=ω0ω1(μ0-μ1)^2 (7)
这个就是类间方差的公式表述,采用遍历的方法得到使类间方差g最大的阈值T,即为所求。
实现思路
- 计算0~255各灰阶对应的像素个数,保存至一个数组中,该数组下标是灰度值,保存内容是当前灰度值对应像素数
- 计算背景图像的平均灰度、背景图像像素数所占比例
- 计算前景图像的平均灰度、前景图像像素数所占比例
- 遍历0~255各灰阶,计算并寻找类间方差极大值
实现代码
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <iostream>
#include <math.h>
int main(int argc, const char* argv[]) {
cv::Mat img = cv::imread("imagepath", cv::IMREAD_COLOR);
int height = img.rows;
int width = img.cols;
cv::Mat out = cv::Mat::zeros(height, width, CV_8UC1);
// gray灰度化
int val = 0;
for (int j = 0; j < height; j++) {
for (int i = 0; i < width; i++) {
val = (int)((float)img.at<cv::Vec3b>(j, i)[0] * 0.0722 + \
(float)img.at<cv::Vec3b>(j, i)[1] * 0.7152 + \
(float)img.at<cv::Vec3b>(j, i)[2] * 0.2126);
out.at<uchar>(j, i) = (uchar)val;
}
}
// determine threshold
double w0 = 0, w1 = 0;
double N = 0, N1 = 0;
double max_g = 0, g = 0;
int th = 0;
for (int T = 0; T < 255; T++)//遍历求阈值
{
w0 = 0;
w1 = 0;
N = 0;
N1 = 0;
for (int j = 0; j < height; j++)
{
for (int i = 0; i < width; i++)
{
val = (int)(out.at<uchar>(j, i));
if (val > T) {
w0++;
N += val;
}
else {
w1++;
N1 += val;
}
}
}
N /= w0;//前景平均灰度
N1 /= w1;//背景平均灰度
w0 /= (height * width);//比例
w1 /= (height * width);
g = w0 * w1 * pow((N - N1), 2);//类间方差
if (g > max_g) { //判断最大类间方差
max_g = g;
th = T;
}
}
// binalization二值化
for (int j = 0; j < height; j++)
{
for (int i = 0; i < width; i++)
{
val = (int)(out.at<uchar>(j, i));
if (val < th)
{
val = 0;
}
else {
val = 255;
}
out.at<uchar>(j, i) = (uchar)val;
}
}
std::cout << "threshold >> " << th << std::endl;
//cv::imwrite("out.jpg", out);
cv::imshow("answer", out);
cv::waitKey(0);
cv::destroyAllWindows();
return 0;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
# Kittle算法
Kittler算法与Otsu方法效果接近,但速度更快,更适宜应用于像素质量较高的图像中。
它的中心思想是,计算整幅图像的梯度灰度的平均值,以此平均值做为阈值。
图像梯度
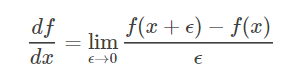
在微积分中,一维函数的一阶微分的基本定义是这样的:
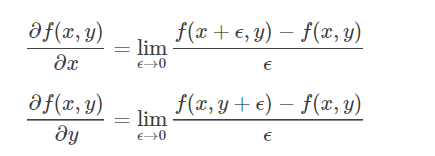
而图像是一个二维函数f(x,y),其微分当然就是偏微分。因此有:
图像是一个离散的二维函数,ϵ不能无限小,我们的图像是按照像素来离散的,最小的ϵ就是0像素。因此,上面的图像微分又变成了如下的形式(ϵ=1):
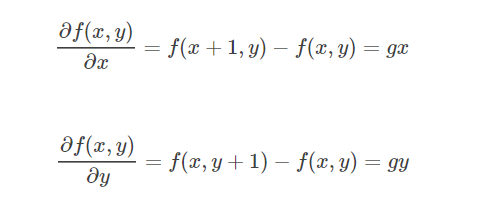
这分别是图像在(x, y)点处x方向和y方向上的梯度,从上面的表达式可以看出来,图像的梯度相当于2个相邻像素之间的差值.
我们先考虑下x方向,选取某个像素,假设其像素值是100,沿x方向的相邻像素分别是90,90,90,则根据上面的计算其x方向梯度分别是10,0,0,如图:
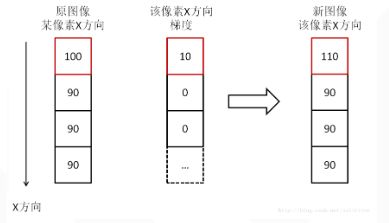
我们看到,相加后的新图像,原图像像素点100与90亮度只相差10,现在是110与90,亮度相差20了,对比度显然增强了,尤其是图像中物体的轮廓和边缘,与背景大大加强了区别,这就是用图像梯度来增强图像的原理。y方向同理,而x和y结合可以用如下式子表示在一起:
由于计算量比较大,于是一般用绝对值来近似平方和平方根的操作,来降低计算量:
代码:
/*该代码未必合理,主要是在梯度灰度平均值的计算原理上有偏差*/
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <iostream>
#include <math.h>
int main(int argc, const char* argv[]) {
cv::Mat img = cv::imread("imori.jpg", cv::IMREAD_COLOR);
int height = img.rows;
int width = img.cols;
cv::Mat out = cv::Mat::zeros(height, width, CV_8UC1);
int tmp = 0;
// gray
int val = 0;
for (int j = 0; j < height; j++) {
for (int i = 0; i < width; i++) {
val = (int)((float)img.at<cv::Vec3b>(j, i)[0] * 0.0722 + \
(float)img.at<cv::Vec3b>(j, i)[1] * 0.7152 + \
(float)img.at<cv::Vec3b>(j, i)[2] * 0.2126);
out.at<uchar>(j, i) = (uchar)val;
tmp += val;
}
}
double grad = 0.0;
//梯度灰度计算
for (int ii = 0; ii < height-1; ii++)
{
for (int jj = 0; jj < width - 1; jj++)
{
double dx = out.at<uchar>(ii, jj + 1) - out.at<uchar>(ii, jj);
double dy = out.at<uchar>(ii+ 1, jj) - out.at<uchar>(ii, jj);
//double ds = std::sqrt((dx*dx + dy * dy) / 2);//求法有异议,看到部分资料没有除以二,有的部分有除以二
double ds = abs(dx) + abs(dy);
grad += ds;
}
}
double imageAvG = grad + tmp;
int th = imageAvG / (height*width);
//二值化
for (int j = 0; j < height; j++)
{
for (int i = 0; i < width; i++)
{
val = (int)(out.at<uchar>(j, i));
if (val < th)
{
val = 0;
}
else {
val = 255;
}
out.at<uchar>(j, i) = (uchar)val;
}
}
std::cout << "threshold >> " << th << std::endl;
//cv::imwrite("out.jpg", out);
cv::imshow("answer", out);
cv::waitKey(0);
cv::destroyAllWindows();
return 0;
}
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71